粒子滤波器¶
| 日期 | 2017-04-05(最后修改),2008-10-08(创建) |
|---|
一个基本的粒子滤波器跟踪算法,使用均匀分布的步长作为运动模型,并将初始目标颜色作为权重函数的决定性特征。这需要一个近似均匀着色的物体,其速度每帧不超过步长。
此实现假设视频流是一系列 numpy 数组、指向此类序列的迭代器或生成一个的生成器。粒子滤波器本身是一个生成器,允许对实时视频流进行操作。
In [3]
#!python
from numpy import *
from numpy.random import *
def resample(weights):
n = len(weights)
indices = []
C = [0.] + [sum(weights[:i+1]) for i in range(n)]
u0, j = random(), 0
for u in [(u0+i)/n for i in range(n)]:
while u > C[j]:
j+=1
indices.append(j-1)
return indices
def particlefilter(sequence, pos, stepsize, n):
seq = iter(sequence)
x = ones((n, 2), int) * pos # Initial position
f0 = seq.next()[tuple(pos)] * ones(n) # Target colour model
yield pos, x, ones(n)/n # Return expected position, particles and weights
for im in seq:
np.add(x, uniform(-stepsize, stepsize, x.shape), out=x, casting="unsafe") # Particle motion model: uniform step
x = x.clip(zeros(2), array(im.shape)-1).astype(int) # Clip out-of-bounds particles
f = im[tuple(x.T)] # Measure particle colours
w = 1./(1. + (f0-f)**2) # Weight~ inverse quadratic colour distance
w /= sum(w) # Normalize w
yield sum(x.T*w, axis=1), x, w # Return expected position, particles and weights
if 1./sum(w**2) < n/2.: # If particle cloud degenerate:
x = x[resample(w),:] # Resample particles according to weights
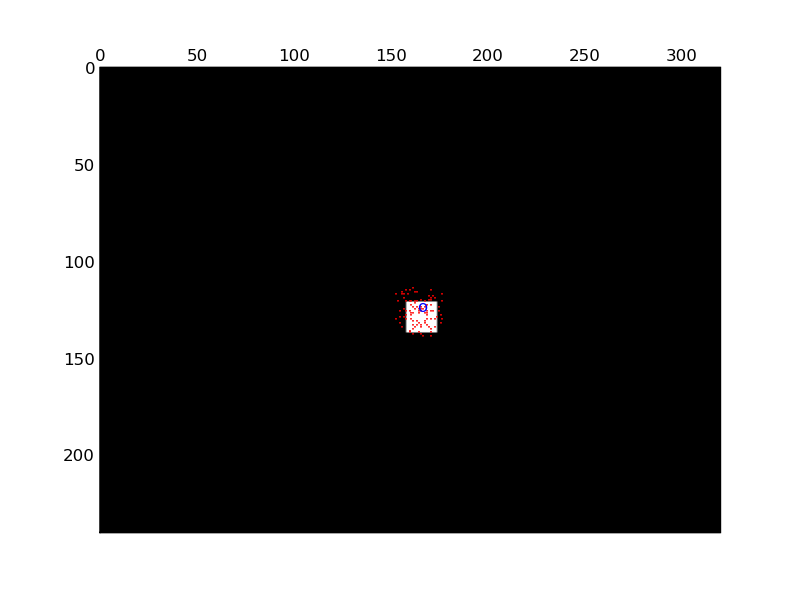
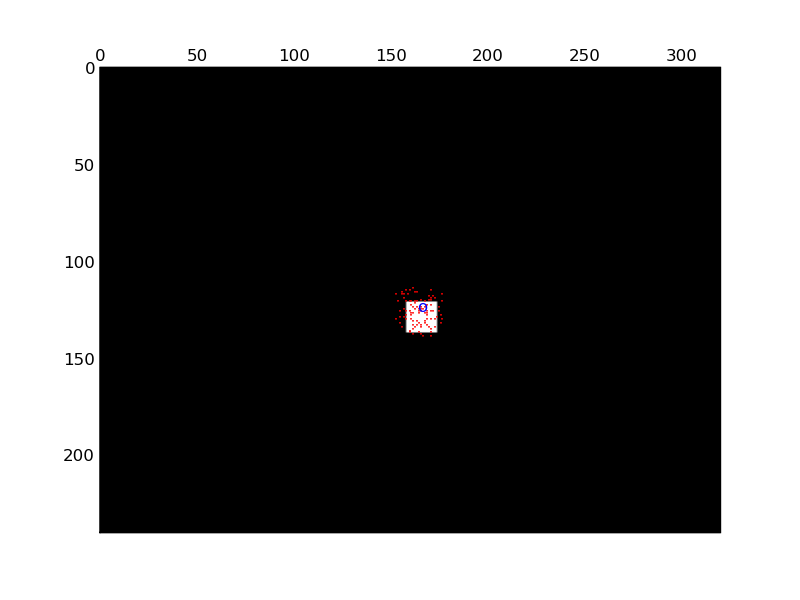
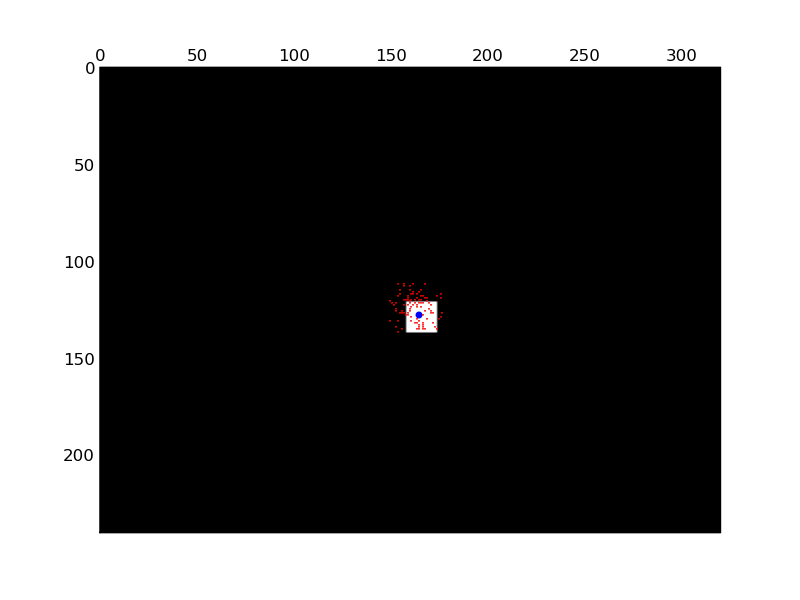
以下代码显示了跟踪器在测试序列上的操作,该序列以均匀背景为背景,显示了一个移动的正方形。
In [5]
#!python
if __name__ == "__main__":
from pylab import *
from itertools import izip
import time
from IPython import display
ion()
seq = [ im for im in zeros((20,240,320), int)] # Create an image sequence of 20 frames long
x0 = array([120, 160]) # Add a square with starting position x0 moving along trajectory xs
xs = vstack((arange(20)*3, arange(20)*2)).T + x0
for t, x in enumerate(xs):
xslice = slice(x[0]-8, x[0]+8)
yslice = slice(x[1]-8, x[1]+8)
seq[t][xslice, yslice] = 255
for im, p in izip(seq, particlefilter(seq, x0, 8, 100)): # Track the square through the sequence
pos, xs, ws = p
position_overlay = zeros_like(im)
position_overlay[np.array(pos).astype(int)] = 1
particle_overlay = zeros_like(im)
particle_overlay[tuple(xs.T)] = 1
draw()
time.sleep(0.3)
clf() # Causes flickering, but without the spy plots aren't overwritten
imshow(im,cmap=cm.gray) # Plot the image
spy(position_overlay, marker='.', color='b') # Plot the expected position
spy(particle_overlay, marker=',', color='r') # Plot the particles
display.clear_output(wait=True)
display.display(show())

In [ ]
章节作者:Unknown[19],BAlexRobinson,Kevin George
附件
{kind=link}
{kind=link}
{kind=link}
{kind=link}