最小二乘圆¶
| 日期 | 2011-03-22(最后修改),2011-03-19(创建) |
|---|
简介¶
此页面收集了用于查找拟合一组 2D 点 (x,y) 的最小二乘圆的不同方法。
此分析的完整代码可在此处获取:least_squares_circle_v1d.py。
查找最小二乘圆对应于查找圆心 (xc, yc) 及其半径 Rc,它们使下面定义的残差函数最小化
#! python
Ri = sqrt( (x - xc)**2 + (y - yc)**2)
residu = sum( (Ri - Rc)**2)
#! python
residu_2 = sum( (Ri**2 - Rc**2)**2)
这导致了以下方法,使用 linalg.solve
#! python
# == METHOD 1 ==
method_1 = 'algebraic'
# coordinates of the barycenter
x_m = mean(x)
y_m = mean(y)
# calculation of the reduced coordinates
u = x - x_m
v = y - y_m
# linear system defining the center (uc, vc) in reduced coordinates:
# Suu * uc + Suv * vc = (Suuu + Suvv)/2
# Suv * uc + Svv * vc = (Suuv + Svvv)/2
Suv = sum(u*v)
Suu = sum(u**2)
Svv = sum(v**2)
Suuv = sum(u**2 * v)
Suvv = sum(u * v**2)
Suuu = sum(u**3)
Svvv = sum(v**3)
# Solving the linear system
A = array([ [ Suu, Suv ], [Suv, Svv]])
B = array([ Suuu + Suvv, Svvv + Suuv ])/2.0
uc, vc = linalg.solve(A, B)
xc_1 = x_m + uc
yc_1 = y_m + vc
# Calcul des distances au centre (xc_1, yc_1)
Ri_1 = sqrt((x-xc_1)**2 + (y-yc_1)**2)
R_1 = mean(Ri_1)
residu_1 = sum((Ri_1-R_1)**2)
使用 scipy.optimize.leastsq¶
Scipy 附带了一些用于解决上述非线性问题的工具。其中,scipy.optimize.leastsq 在这种情况下非常易于使用。
实际上,一旦定义了圆心,半径可以直接计算出来,并且等于 mean(Ri)。因此,只剩下两个参数:xc 和 yc。
基本用法¶
#! python
# == METHOD 2 ==
from scipy import optimize
method_2 = "leastsq"
def calc_R(xc, yc):
""" calculate the distance of each 2D points from the center (xc, yc) """
return sqrt((x-xc)**2 + (y-yc)**2)
def f_2(c):
""" calculate the algebraic distance between the data points and the mean circle centered at c=(xc, yc) """
Ri = calc_R(*c)
return Ri - Ri.mean()
center_estimate = x_m, y_m
center_2, ier = optimize.leastsq(f_2, center_estimate)
xc_2, yc_2 = center_2
Ri_2 = calc_R(*center_2)
R_2 = Ri_2.mean()
residu_2 = sum((Ri_2 - R_2)**2)
高级用法,使用雅可比函数¶
为了提高速度,可以通过添加 Dfun 参数来告诉 optimize.leastsq 如何计算函数的雅可比矩阵
#! python
# == METHOD 2b ==
method_2b = "leastsq with jacobian"
def calc_R(xc, yc):
""" calculate the distance of each data points from the center (xc, yc) """
return sqrt((x-xc)**2 + (y-yc)**2)
def f_2b(c):
""" calculate the algebraic distance between the 2D points and the mean circle centered at c=(xc, yc) """
Ri = calc_R(*c)
return Ri - Ri.mean()
def Df_2b(c):
""" Jacobian of f_2b
The axis corresponding to derivatives must be coherent with the col_deriv option of leastsq"""
xc, yc = c
df2b_dc = empty((len(c), x.size))
Ri = calc_R(xc, yc)
df2b_dc[0] = (xc - x)/Ri # dR/dxc
df2b_dc[1] = (yc - y)/Ri # dR/dyc
df2b_dc = df2b_dc - df2b_dc.mean(axis=1)[:, newaxis]
return df2b_dc
center_estimate = x_m, y_m
center_2b, ier = optimize.leastsq(f_2b, center_estimate, Dfun=Df_2b, col_deriv=True)
xc_2b, yc_2b = center_2b
Ri_2b = calc_R(*center_2b)
R_2b = Ri_2b.mean()
residu_2b = sum((Ri_2b - R_2b)**2)
#! python
(x - xc)**2 + (y-yc)**2 - Rc**2 = 0
基本用法¶
这将导致以下代码
#! python
# == METHOD 3 ==
from scipy import odr
method_3 = "odr"
def f_3(beta, x):
""" implicit definition of the circle """
return (x[0]-beta[0])**2 + (x[1]-beta[1])**2 -beta[2]**2
# initial guess for parameters
R_m = calc_R(x_m, y_m).mean()
beta0 = [ x_m, y_m, R_m]
# for implicit function :
# data.x contains both coordinates of the points (data.x = [x, y])
# data.y is the dimensionality of the response
lsc_data = odr.Data(row_stack([x, y]), y=1)
lsc_model = odr.Model(f_3, implicit=True)
lsc_odr = odr.ODR(lsc_data, lsc_model, beta0)
lsc_out = lsc_odr.run()
xc_3, yc_3, R_3 = lsc_out.beta
Ri_3 = calc_R([xc_3, yc_3])
residu_3 = sum((Ri_3 - R_3)**2)
#! python
# == METHOD 3b ==
method_3b = "odr with jacobian"
def f_3b(beta, x):
""" implicit definition of the circle """
return (x[0]-beta[0])**2 + (x[1]-beta[1])**2 -beta[2]**2
def jacb(beta, x):
""" Jacobian function with respect to the parameters beta.
return df_3b/dbeta
"""
xc, yc, r = beta
xi, yi = x
df_db = empty((beta.size, x.shape[1]))
df_db[0] = 2*(xc-xi) # d_f/dxc
df_db[1] = 2*(yc-yi) # d_f/dyc
df_db[2] = -2*r # d_f/dr
return df_db
def jacd(beta, x):
""" Jacobian function with respect to the input x.
return df_3b/dx
"""
xc, yc, r = beta
xi, yi = x
df_dx = empty_like(x)
df_dx[0] = 2*(xi-xc) # d_f/dxi
df_dx[1] = 2*(yi-yc) # d_f/dyi
return df_dx
def calc_estimate(data):
""" Return a first estimation on the parameter from the data """
xc0, yc0 = data.x.mean(axis=1)
r0 = sqrt((data.x[0]-xc0)**2 +(data.x[1] -yc0)**2).mean()
return xc0, yc0, r0
# for implicit function :
# data.x contains both coordinates of the points
# data.y is the dimensionality of the response
lsc_data = odr.Data(row_stack([x, y]), y=1)
lsc_model = odr.Model(f_3b, implicit=True, estimate=calc_estimate, fjacd=jacd, fjacb=jacb)
lsc_odr = odr.ODR(lsc_data, lsc_model) # beta0 has been replaced by an estimate function
lsc_odr.set_job(deriv=3) # use user derivatives function without checking
lsc_odr.set_iprint(iter=1, iter_step=1) # print details for each iteration
lsc_out = lsc_odr.run()
xc_3b, yc_3b, R_3b = lsc_out.beta
Ri_3b = calc_R(xc_3b, yc_3b)
residu_3b = sum((Ri_3b - R_3b)**2)
#! python
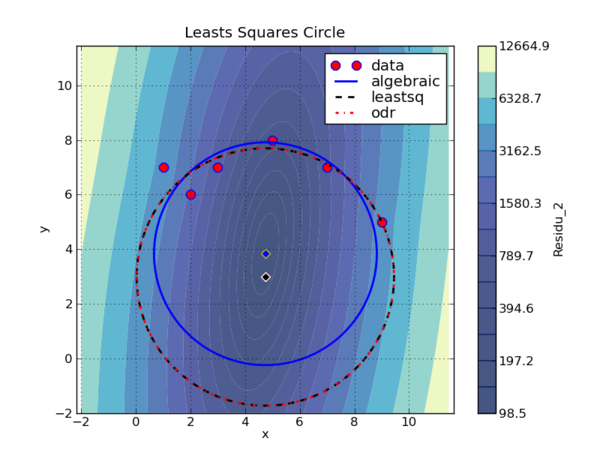
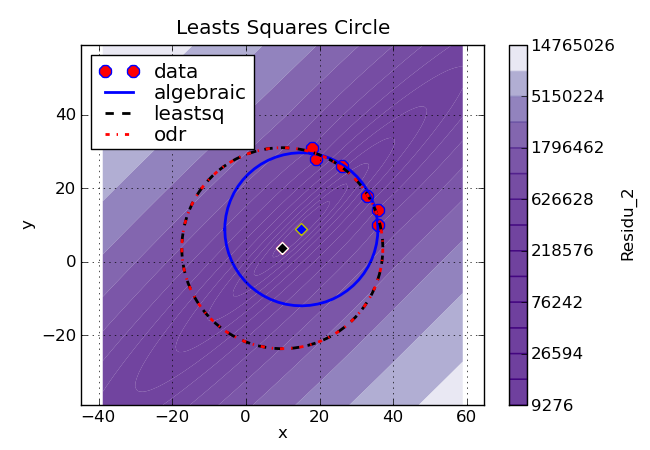
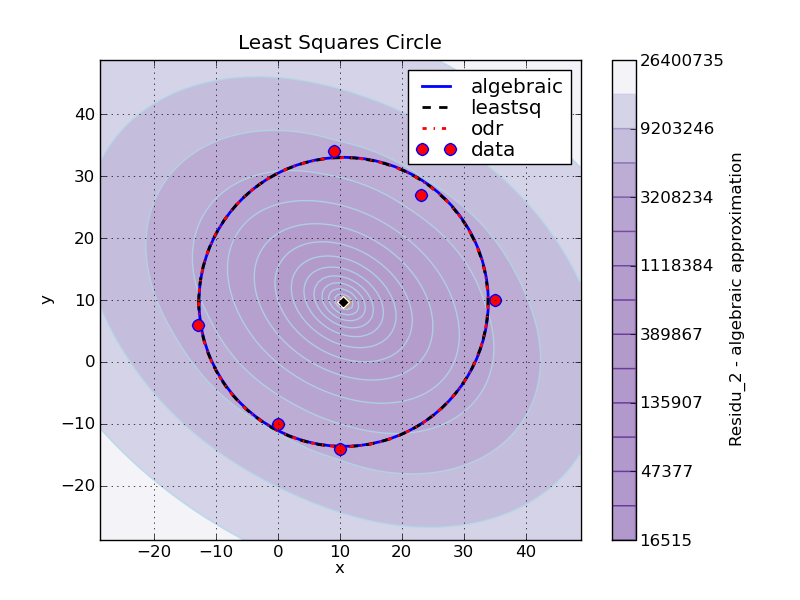
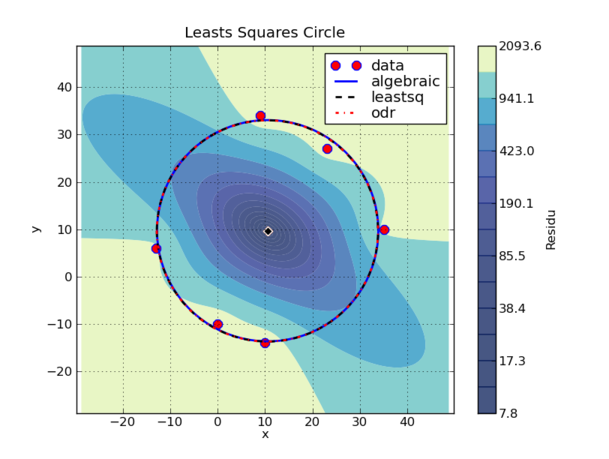
# Coordinates of the 2D points
x = r_[ 9, 35, -13, 10, 23, 0]
y = r_[ 34, 10, 6, -14, 27, -10]
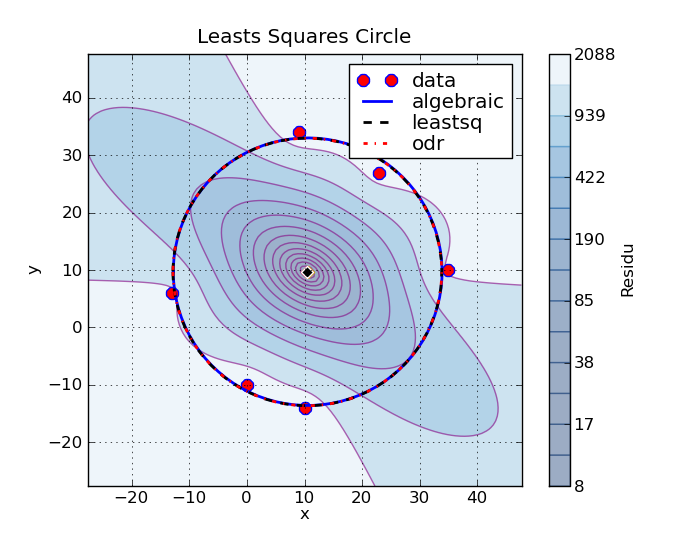
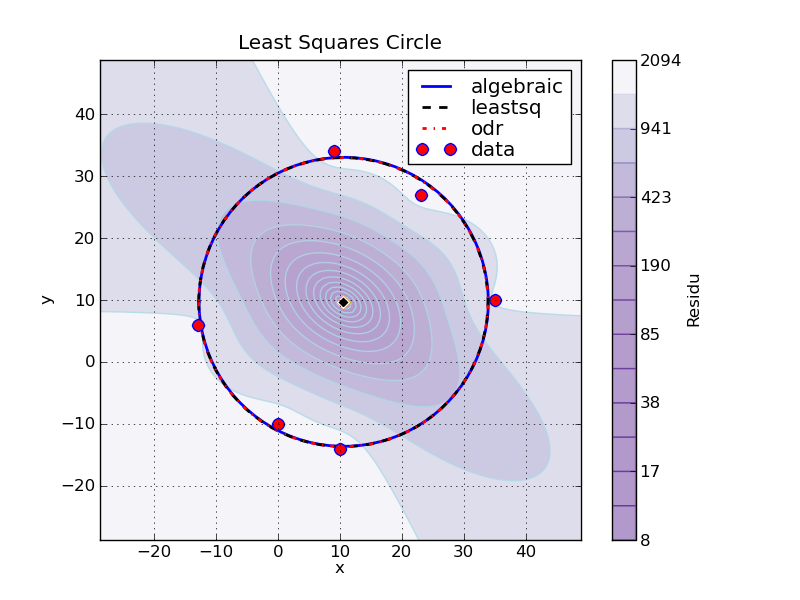
这将给出
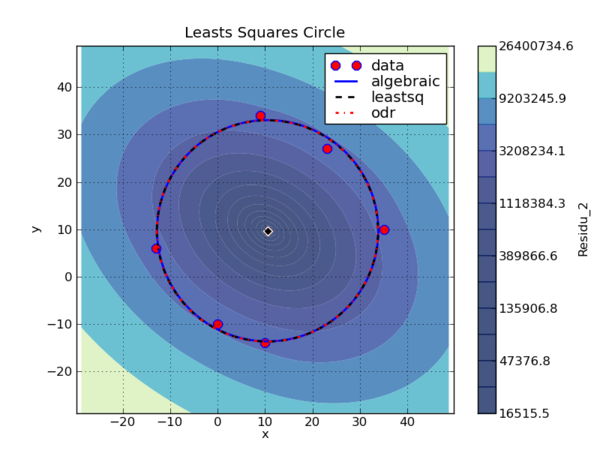
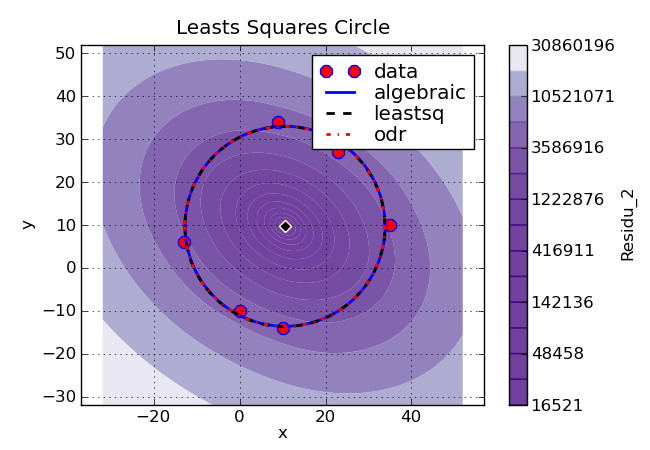
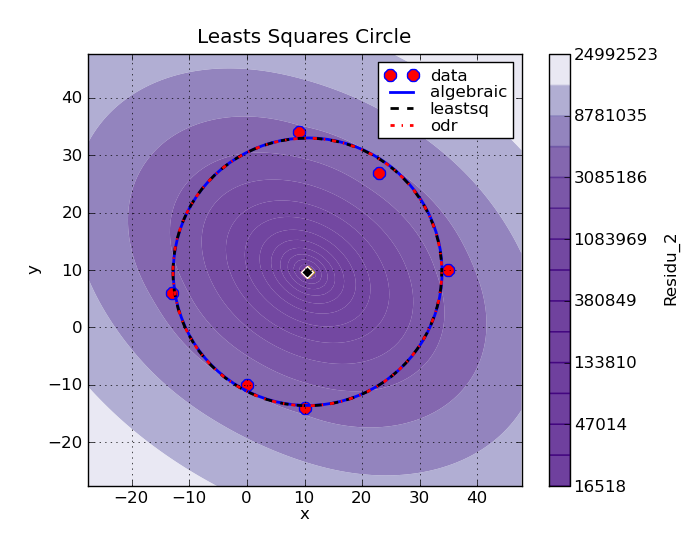
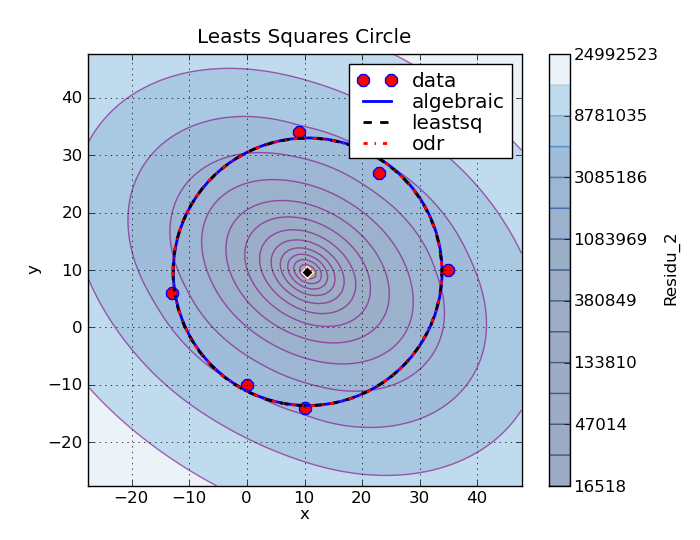
||||||||||||||||<tablewidth="100%">摘要|| ||方法|| Xc || Yc || Rc ||nb_calls || std(Ri)|| residu || residu2 || ||代数 || 10.55231 || 9.70590|| 23.33482|| 1|| 1.135135|| 7.731195|| 16236.34|| ||leastsq || 10.50009 || 9.65995|| 23.33353|| 15|| 1.133715|| 7.711852|| 16276.89|| ||leastsq with jacobian || 10.50009 || 9.65995|| 23.33353|| 7|| 1.133715|| 7.711852|| 16276.89|| ||odr || 10.50009 || 9.65995|| 23.33353|| 82|| 1.133715|| 7.711852|| 16276.89|| ||odr with jacobian || 10.50009 || 9.65995|| 23.33353|| 16|| 1.133715|| 7.711852|| 16276.89||
注意
* `nb_calls` 对应于 要 最小化 的 函数 的 调用 次数, 不 考虑 对 导数 函数 的 调用 次数。 这 与 迭代 次数 不同, 因为 ODR 可以在 一次 迭代 中 进行 多次 调用。
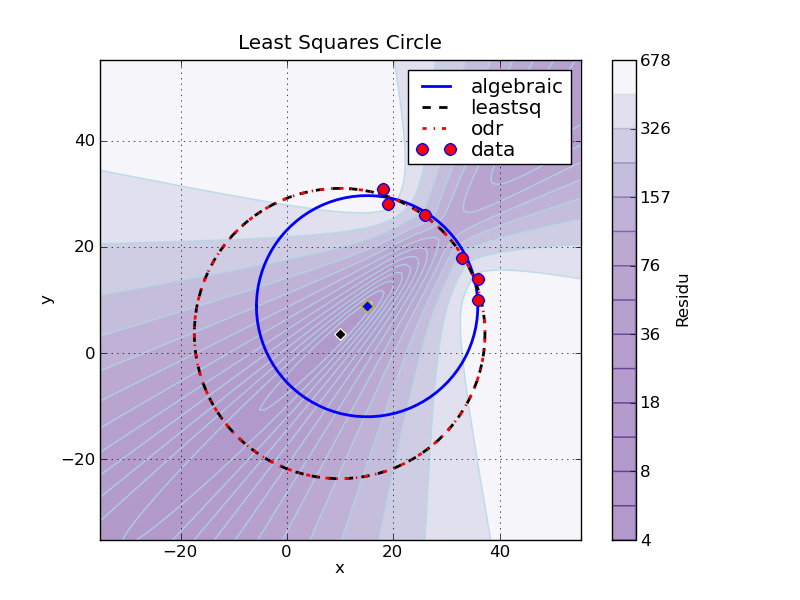
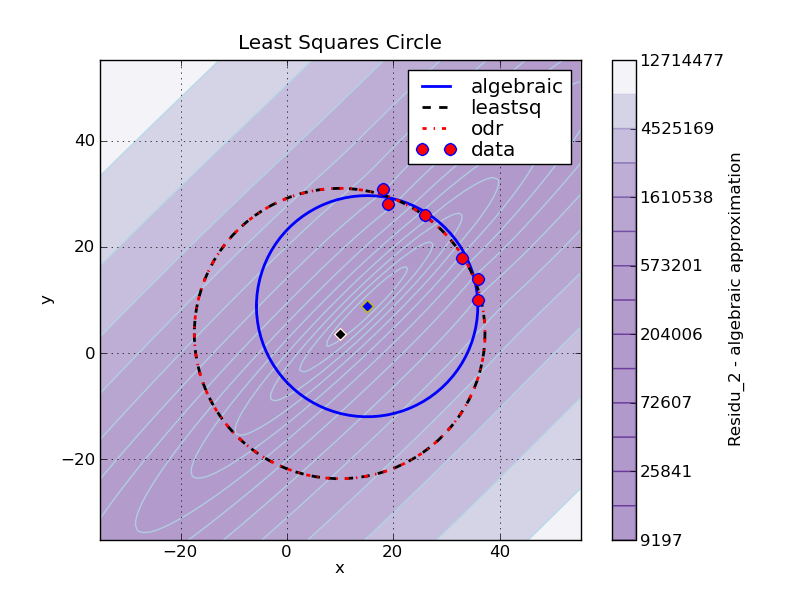
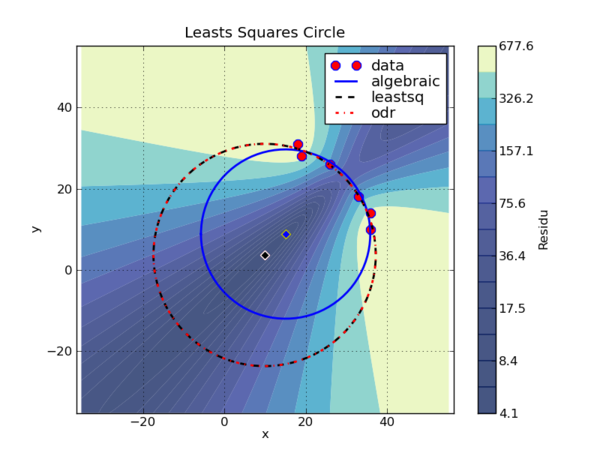
* 如 以下 图形 所示, 两个 函数 `residu` 和 `residu_2` 并不 等效, 但 它们的 最小值 在这种 情况下 很 接近。


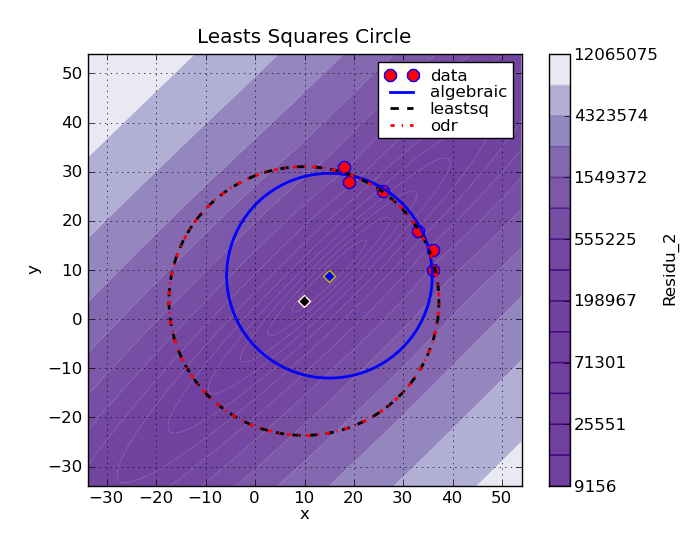
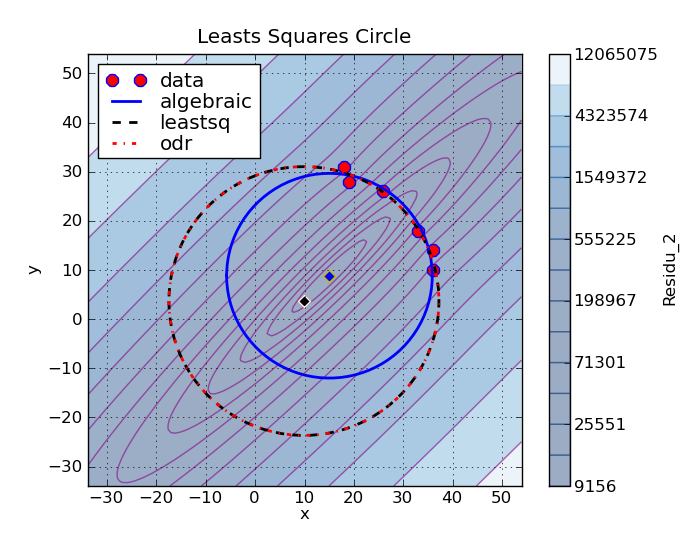
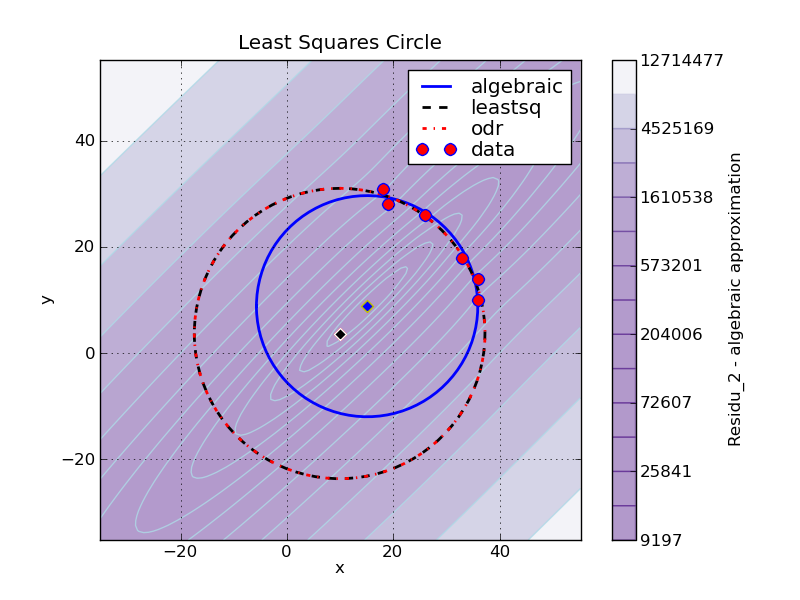
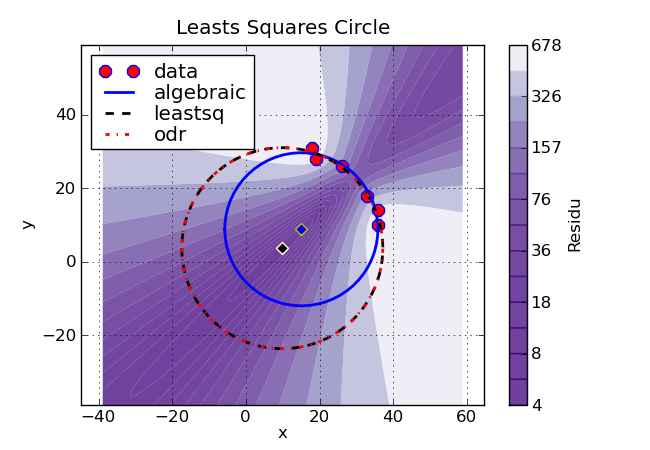
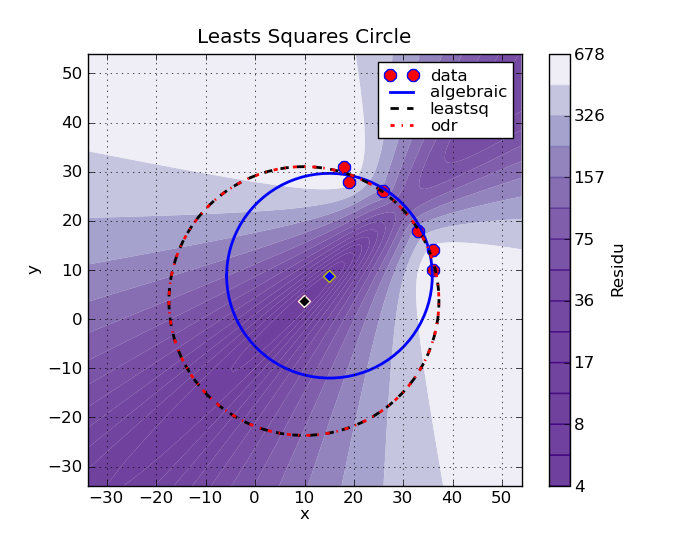
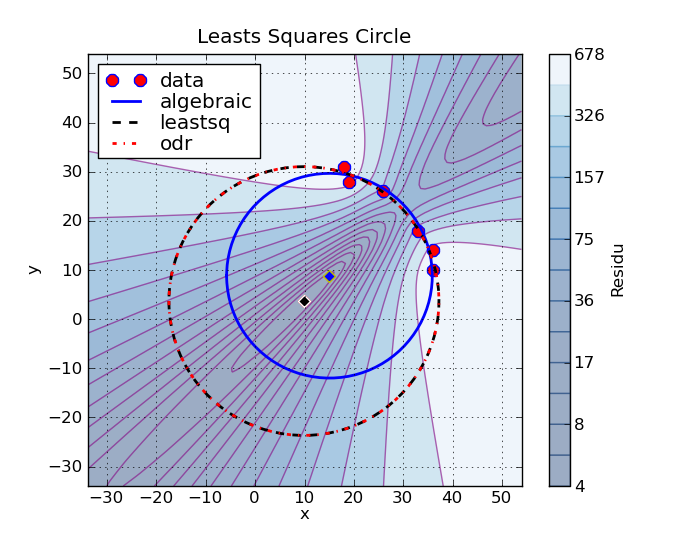
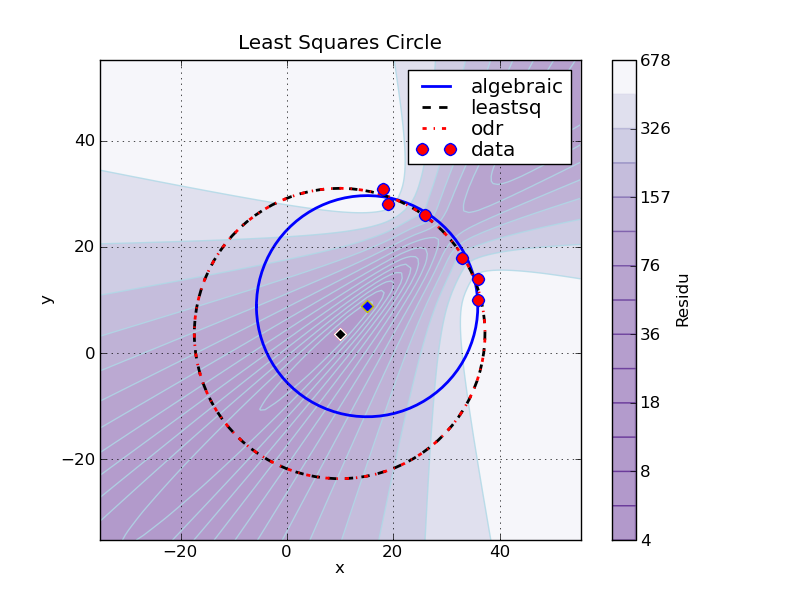
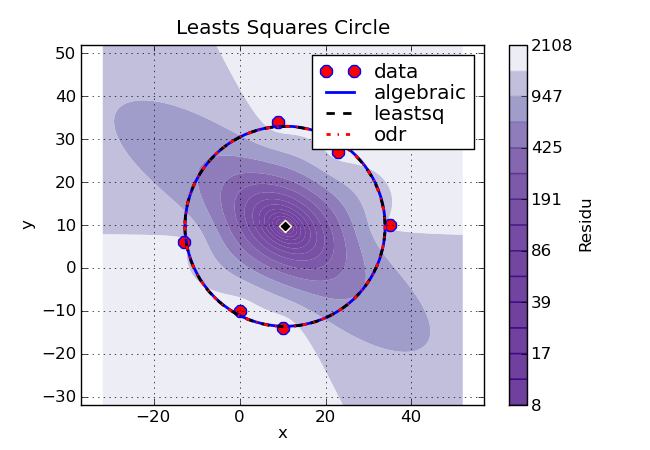
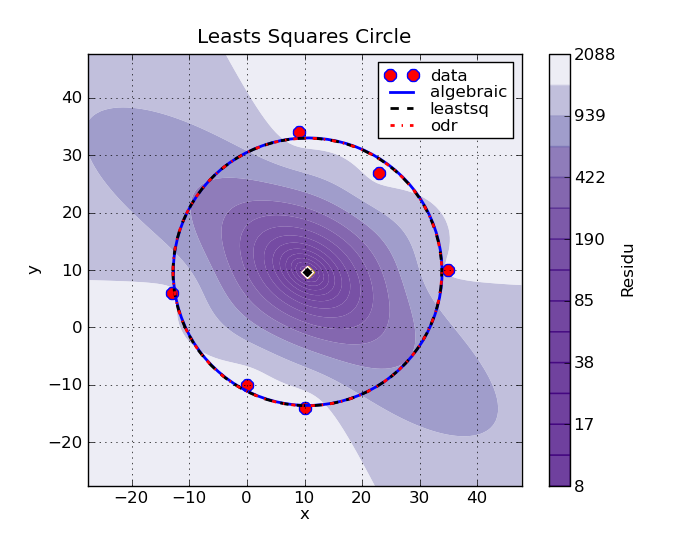
数据点在弧周围¶
以下是一个数据点形成弧的示例
#! python
x = r_[36, 36, 19, 18, 33, 26]
y = r_[14, 10, 28, 31, 18, 26]
| '''方法''' | '''Xc''' | '''Yc''' | '''Rc''' | '''nb_calls''' | '''std(Ri)''' | '''residu''' | '''residu2''' |
|---|---|---|---|---|---|---|---|
| 代数 | 15.05503 | 8.83615 | 20.82995 | 1 | 0.930508 | 5.195076 | 9153.40 |
| leastsq | 9.88760 | 3.68753 | 27.35040 | 24 | 0.820825 | 4.042522 | 12001.98 |
| leastsq with jacobian | 9.88759 | 3.68752 | 27.35041 | 10 | 0.820825 | 4.042522 | 12001.98 |
| odr | 9.88757 | 3.68750 | 27.35044 | 472 | 0.820825 | 4.042522 | 12002.01 |
| odr with jacobian | 9.88757 | 3.68750 | 27.35044 | 109 | 0.820825 | 4.042522 | 12002.01 |
{kind=link}
{kind=link}
结论¶
ODR 和 leastsq 给出了相同的结果。
Optimize.leastsq 是最有效的方法,至少在函数调用次数方面,它可以比 ODR 快两到十倍。
添加一个计算雅可比矩阵的函数可以将函数调用次数减少两到五倍。
在这种情况下,使用 ODR 似乎有点过分,但对于更复杂的用例(如省略号)来说,它非常方便。
当所有点都围绕圆形时,代数近似法可以得到良好的结果,但当只有弧线要拟合时,它就受到限制。
事实上,当数据点不完全位于圆上时,要最小化的两个误差函数并不等效。代数方法在大多数情况下会导致比最小二乘圆更小的半径,因为它的误差函数基于平方距离,而不是距离本身。
章节作者:Elby
附件
arc_residu2_v1.pngarc_residu2_v2.pngarc_residu2_v3.pngarc_residu2_v4.pngarc_residu2_v5.pngarc_residu2_v6.pngarc_v1.pngarc_v2.pngarc_v3.pngarc_v4.pngarc_v5.pngfull_cercle_residu2_v1.pngfull_cercle_residu2_v2.pngfull_cercle_residu2_v3.pngfull_cercle_residu2_v4.pngfull_cercle_residu2_v5.pngfull_cercle_v1.pngfull_cercle_v2.pngfull_cercle_v3.pngfull_cercle_v4.pngfull_cercle_v5.pngleast_squares_circle.pyleast_squares_circle_v1.pyleast_squares_circle_v1b.pyleast_squares_circle_v1c.pyleast_squares_circle_v1d.pyleast_squares_circle_v2.pyleast_squares_circle_v3.py
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}